PMSM motors (Permanent Magnet Synchronous Motors) are widely used in electric vehicles, hydraulic systems, industrial machinery, traction systems, and off-highway equipment because of their high efficiency, compact design, and excellent torque performance.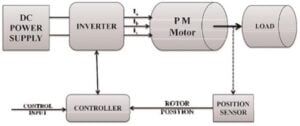
However, proper motor performance depends heavily on correct controller integration. Even high-quality PM synchronous motors can experience startup failures, communication issues, or unstable performance when paired incorrectly with motor controllers.
Many OEMs, technicians, and engineers commonly face connection issues while integrating PMSM motors with controllers like Sevcon (Turntide) and 3Shul controllers.
From phase wiring errors to Hall sensor problems, small setup mistakes can prevent the motor from running properly.
In this guide, we explain the most common PMSM motor and controller connection problems, their causes, and practical solutions.
Before troubleshooting, it is important to understand how PMSM motors and controllers work together.
A motor controller manages the speed, torque, and performance of the motor. Controllers such as Sevcon (Turntide) and 3Shul regulate motor operation using inputs like: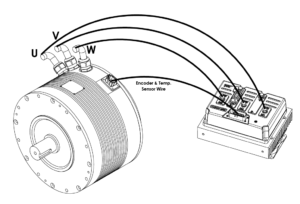
- Phase connections (U, V, W)
- Hall sensors
- Encoder signals
- Battery voltage
- Current settings
- Motor parameters
If even one configuration is incorrect, the PMSM motor may fail to rotate or generate performance issues.
- PMSM Motor Not Rotating After Connection
One of the most common problems occurs when the motor does not move after powering the system.
Possible Causes
- Incorrect phase wiring
- Hall sensor mismatch
- Wrong controller parameters
- Motor not detected by controller
- Fault settings enabled
Solution
Start by checking the U, V, and W phase connections between the motor and controller.
If the phase sequence is incorrect, the controller cannot properly energize the motor.
Also verify:
- Hall sensor wiring
- Battery voltage compatibility
- Controller enable settings
For Sevcon controllers, motor setup files and DVT software parameters should be checked carefully.
For 3Shul controllers, ensure motor tuning and phase mapping are configured properly.
- Wrong Phase Wiring (U, V, W Mismatch)
Incorrect phase wiring is one of the biggest reasons for startup failures.
When U, V, and W motor phases are connected incorrectly, symptoms may include:
- Motor vibration
- Jerking movement
- Reverse rotation
- Failure to start
Solution
Check the motor phase sequence.
If the motor rotates incorrectly, swap any two phase wires and test again.
However, when using Sevcon (Turntide) or 3Shul controllers, phase wires should always match motor configuration parameters.
Random wire swapping without software verification can sometimes create controller faults.
- Hall Sensor Connection Issues
Many PMSM motors use Hall sensors for rotor position feedback.
If Hall sensor wiring is incorrect, the controller may fail to detect motor position properly.
Common Symptoms
- Motor shaking during startup
- Rough operation
- No rotation
- Error codes in controller
Solution
Check Hall sensor wiring carefully.
Verify:
- 5V power supply
- Ground connection
- Signal wires
Use a multimeter or controller diagnostics software to confirm sensor outputs.
In Sevcon controllers, Hall sensor calibration is important.
For 3Shul controllers, ensure Hall angle settings match motor specifications.
- Controller Not Detecting the PMSM Motor
Sometimes the controller powers on correctly, but the PMSM motor is not detected.
Possible Causes
- Incorrect motor profile
- Missing encoder configuration
- Wrong motor settings
- CAN communication issue
Solution
Always configure:
- Motor voltage
- Maximum RPM
- Pole pairs
- Current limits
For Sevcon (Turntide) controllers, motor mapping through setup software is often required.
For 3Shul controllers, verify firmware compatibility and tuning settings.
Without proper parameter matching, the controller may fail to recognize the motor.
- Overcurrent Fault During Startup
Many users experience overcurrent faults immediately after motor startup.
Common Reasons
- Wrong motor parameters
- Excessive current settings
- Incorrect acceleration tuning
- Phase mismatch
Solution
Reduce startup current settings.
Recheck:
- Motor inductance values
- Current limits
- Battery voltage compatibility
Both Sevcon and 3Shul controllers require proper motor tuning for smooth startup.
Improper current values may trigger controller protection.
- PMSM Motor Heating Issues
Sometimes the motor starts but overheats during operation.
Possible Causes
- Incorrect tuning
- Excessive load
- Poor cooling
- Wrong controller frequency settings
Solution
Verify controller tuning parameters.
Incorrect tuning often causes inefficient current delivery, increasing motor heating.
For demanding applications, using liquid cooled PMSM motors can significantly improve thermal management.
Also ensure:
- Proper ventilation
- Temperature sensor calibration
- Correct current settings
- Encoder Mismatch Problems
High-performance PM synchronous motors often use encoders for accurate position feedback.
If encoder settings do not match controller configuration, problems may occur.
Symptoms
- Unstable RPM
- Incorrect motor speed
- Startup failure
- Fault alarms
Solution
Verify:
- Encoder type
- Pole pair settings
- Resolution values
In Sevcon controllers, encoder setup must align with DVT parameters.
In 3Shul controllers, encoder calibration should match motor manufacturer specifications.
- Communication Problems in Sevcon (Turntide) Controllers
Many users experience communication issues while configuring Sevcon controllers.
Common Causes
- Incorrect CAN settings
- Firmware mismatch
- DVT software configuration errors
Solution
Check:
- CAN baud rate
- Software version compatibility
- Controller firmware
Always use compatible setup tools when configuring Turntide Sevcon controllers.
- Parameter Mismatch in 3Shul Controllers
Incorrect parameter setup is a common issue in 3Shul controllers.
Problems Caused
- Poor acceleration
- RPM instability
- Controller shutdown
- Reduced efficiency
Solution
Always match:
- Voltage settings
- Motor current
- Speed limits
- Hall angle settings
Motor-controller compatibility plays an important role in stable performance.